In the past, the team has had success in the FIRST Lego League, going to the FIRST World Festival in Atlanta to represent the UK twice, in 2007 and 2009.
The competition is split into four different categories, each accounting for 25% of the total score: Robot Performance, a Technical Presentation, a Research Project, and Teamwork.
2008-2009: Climate Connections old site
This is the final year we competed in FLL. We built a robot capable of achieving a perfect score, and became the first ever team to achieve a perfect score - 400 points - at the UK National finals. In addition, the robot did it with 20 seconds to spare! As a result, we qualified for the World Festival for a second time.
The team came fourth in the world in robot performance, achieving a perfect score on the competition table in one of its runs, and won the first place trophy for Innovative Design.
 FLL Atlanta trophy
FLL Atlanta trophy
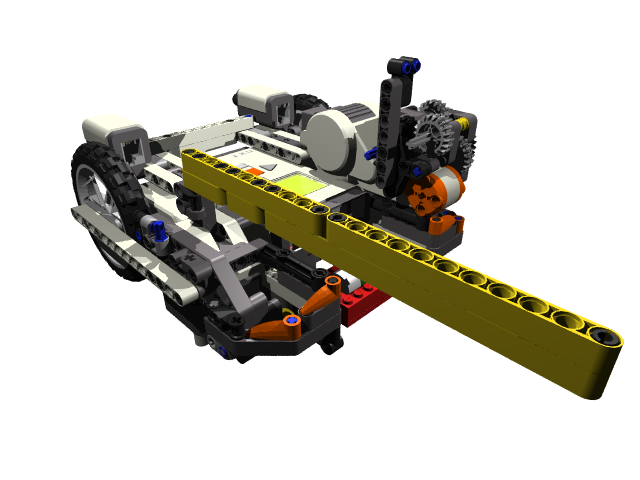
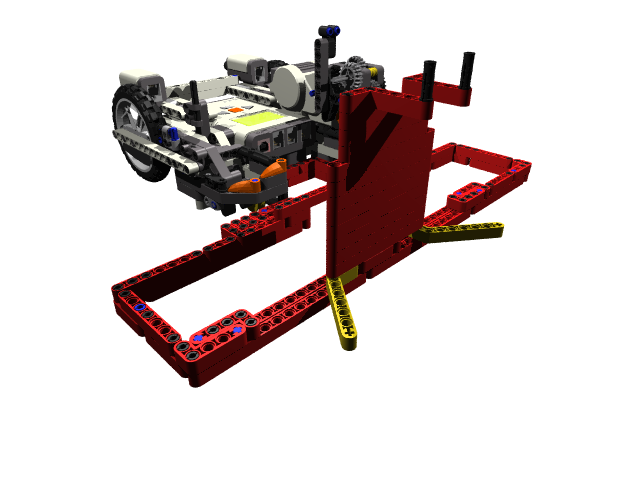
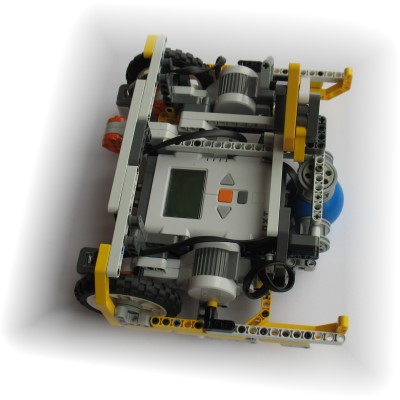 The FLL robot
The FLL robot
 The Highly commended award we won at the Big Bang Science fair
The Highly commended award we won at the Big Bang Science fair
 The team demo-ing at the Big Bang Science fair
The team demo-ing at the Big Bang Science fair
You can see the development of the robot design here
2007-2008: Power Puzzle old site
Our robot is nxt-based, and achieves a low centre of gravity from its nxt brick being mounted around one stud off the ground, with some extra weight on its base – the LEGO rechargeable battery. Conventionally, it uses two motors for drive. It also has a simple attachment bay on its other motor, which is geared down (25:9) to provide extra torque and reduce its speed, which we found was too high. We use this, as well as other areas of the robot, to attach a selection of attachments for the missions.
A set of LDraw files detailing the construction of the robot can be found in this zip file.
 Program 1 - Solar Satellite
The robot is aimed by eye, drives out at full power towards the satellite, and bumps it.
Program 1 - Solar Satellite
The robot is aimed by eye, drives out at full power towards the satellite, and bumps it.
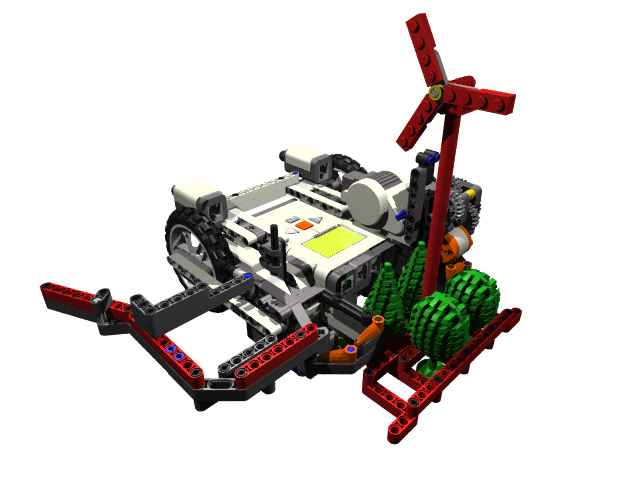 Program 2 - Wave Turbine, Trees, & Truck Retrieval
The robot uses the wave turbine to contain the trees, and hooks the truck as it returns to base.
Program 3a - Car & Solar Panel
The robot pushes the car out on a wheeled skid to prevent friction from the rubber tyres on the car. The solar panel is encased in, but not attached to, a rubber hooky thing, and is delivered before the robot returns to base.
Program 3b - Truck to Parking Lot
The robot gives the truck a small push into the parking lot.
Program 2 - Wave Turbine, Trees, & Truck Retrieval
The robot uses the wave turbine to contain the trees, and hooks the truck as it returns to base.
Program 3a - Car & Solar Panel
The robot pushes the car out on a wheeled skid to prevent friction from the rubber tyres on the car. The solar panel is encased in, but not attached to, a rubber hooky thing, and is delivered before the robot returns to base.
Program 3b - Truck to Parking Lot
The robot gives the truck a small push into the parking lot.
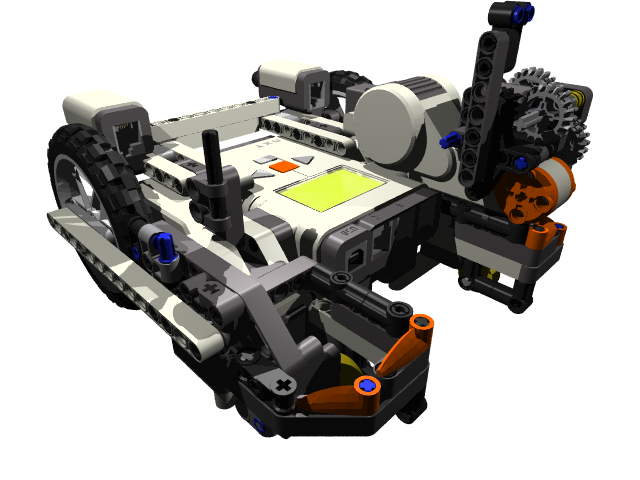
 Program 4 - Corn and Uranium
The robot uses a large hook to scoop the corn, and then the uranium, before returning to base.
Program 4 - Corn and Uranium
The robot uses a large hook to scoop the corn, and then the uranium, before returning to base.
 Program 5 - Oil Delivery & Coal
The robot pushes an oil barrel in a container to the farm, and then pushes the lever at the end of the rails with a long pole.
Program 6 - Dam
The robot is aimed toward the northern river, and simply drives out of base and back in again.
Program 5 - Oil Delivery & Coal
The robot pushes an oil barrel in a container to the farm, and then pushes the lever at the end of the rails with a long pole.
Program 6 - Dam
The robot is aimed toward the northern river, and simply drives out of base and back in again.
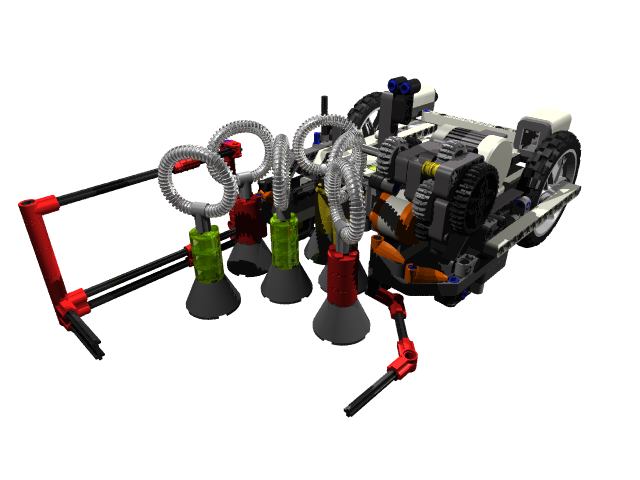
 Program 7 - Grid Connection, Wind Turbines, & Power Plant Supply
The robot pushes out a large container holding the wind turbines, the electicity lines and a scoop. The uranium and coal are placed in the scoop, and delivered to the power plant.
Program 8 - Oil Rig
The robot drives out with a basket, pushes down on the lever with a long pole, waits for the oil barrels to fall in, and returns to base.
Program 7 - Grid Connection, Wind Turbines, & Power Plant Supply
The robot pushes out a large container holding the wind turbines, the electicity lines and a scoop. The uranium and coal are placed in the scoop, and delivered to the power plant.
Program 8 - Oil Rig
The robot drives out with a basket, pushes down on the lever with a long pole, waits for the oil barrels to fall in, and returns to base.
2006-2007: Nanoquest
This was the first year of the Technobotts. We scraped through the Essex regional heat, but then went on to win the robot performance rounds in the National Finals, soaring through with a 355 point run. This got us through to the Nano Quest World festival in Atlanta, where we placed 28th out of 104 teams from all over the world.