This year, the team have decided to enter a different competition to before, called RoboCup Soccer. Two "teams" of autonomous robots, each consisting of 1 or 2 robots, have to play against each other in a robotic football match.
The competition
The robots play on a 72″ by 48″ field, with 5½″ high wall around the edge. The wall is painted black, and the field consists of green carpet tiles. There is a 17¾″ goal at either end, painted yellow or blue.
The robots play with a specially designed ball, with 20 IR-emitting LEDS. This enables the robots to see the ball.
Each robot must be completely autonomous, and must fit within a 22cm cylinder when fully extended. It must also have a handle on the top, to allow the referee to pick it up.
UK finals
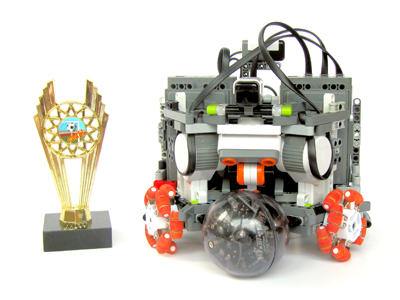 Our robot and trophy
Our robot and trophy
In March, we went to the UK Finals in Birkenhead. There, we participated in the Soccer and Rescue competitions. We won all our Soccer games, with score exceeding 7:0, except for one game, where a stupid mistake was inserted into the code to fix a minor bug. Nevertheless, we came out with a trophy, and a big congratulations. You can see a video of the final above. As a result, we qualified for Robocup 2010, in Singapore.
Singapore
Since the UK final in March, which was played 1-on-1, the team has completed its second robot and almost completely redesigned the first one, to take into account the different requirements for the international competition. We've made contact with Iranian and Portuguese teams already — both vastly more experienced than us — and are awaiting our matches with some trepidation. We spent a while attempting to design a solenoid ball kicker but in the end there was not sufficient time to complete this, so we are sticking with the original design, powered by a Lego motor.
The robots
Given our previous experience in lego robotics competitions, we decided to use the LEGO Mindstorms NXT robotics kit. However, we soon found out that we did not have enough kits, particularly since one of our kits was used in an old robot to demo at the Big Bang Science Fair. Thankfully, John Lewis donated two shiny new NXT 2.0 kits to the team, which we are incredibly grateful for. In thanks, we've named our robots “John” and “Lewis”!
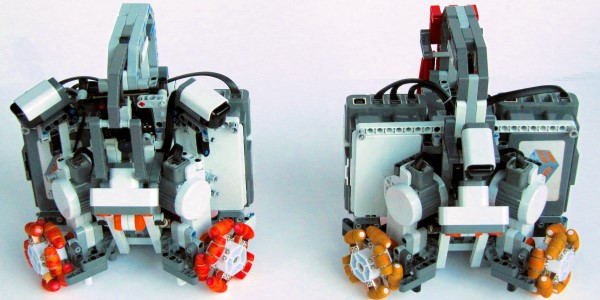 Our two soccer robots, John and Lewis
Our two soccer robots, John and Lewis
.jpg "Click to load the 3D spin (4MB)!") A 3D spin of our robot, John
A 3D spin of our robot, John
The 2 robots are shown above. The one on the left is John, the forward robot, which now has image recognition built in using the on-board camera, so that it can differentiate between the blue (or yellow) goal and the black end wall of the pitch, to improve accuracy in shooting at the goal, after it has used the compass sensor to orient itself and get the ball to the right end of the pitch. It also uses 2 IR-seeker sensors to let it detect the ball with improved accuracy, and has an ultrasonic sensor so it can determine when it has the ball in its possession.
The one on the right is Lewis, the goalie robot, which uses a compass sensor, one IR-seeker, one ultrasonic sensor, and a touch sensor. Its task is to stay near the goal it is defending and to try to keep the ball out of it.
Both robots are programmed using LeJOS NXJ, a Java language for the NXT brick.